Simple Drawing/Engraving
Requirements: Rhinoceros 5, Grasshopper 0.9.0076, KUKA|prc V2
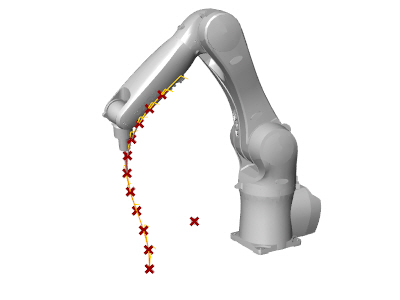
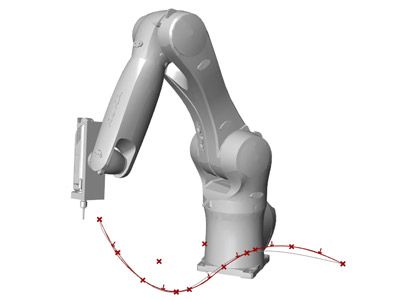
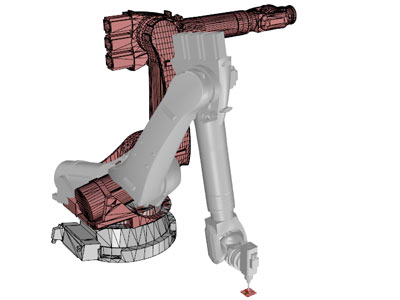
A simple example on how to have the tool follow a toolpath, e.g. for drawing or engraving.
Requirements: Rhinoceros 5, Grasshopper 0.9.0076, KUKA|prc V2
A simple example on how to have the tool follow a toolpath, e.g. for drawing or engraving.